
プログラミングカーを動かすのには、普通コンピュータ(WindowsパソコンやChromeBook、iPadなど)を使用します。これを使ったプログラムはいろいろできて便利な反面、事前にプログラミングの仕方などをある程度覚える必要があります。教育現場でなかなかプログラミング学習が進まない理由の一つに、このような先生方の苦手意識があるように思えます。アンプラグドプログラミングのように気軽にできる機器を開発できないかと思っていました。
そこで、色カードを使ってプログラミングカーを動かすシステムを作ってみました。色カードを使う利点は、低学年でもプログラミングカーの電源を入れただけで簡単にプログラミングの入門ができることです。(コンピュータ上でのプログラムは不要な分、ハードルが低いです) さらに、学年が進んだら、ブロック型言語を使ってプログラミングカーを使用できるので、一石二鳥です。
まずは、どんなシステムなのか、ビデオで見てください。
概要
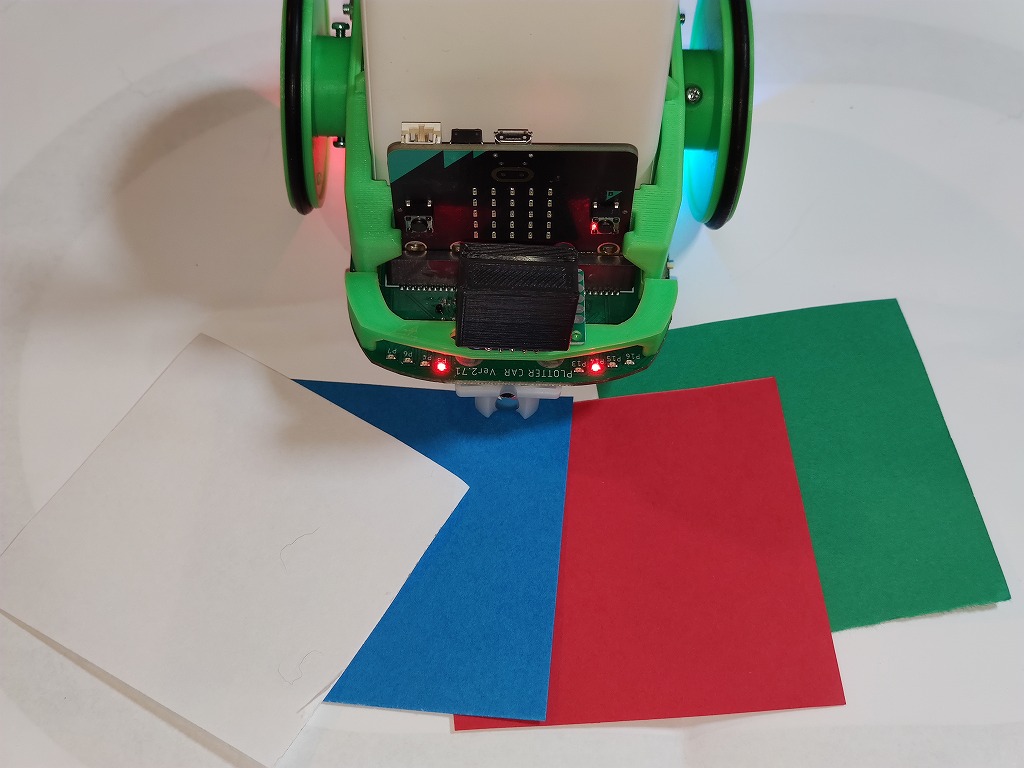
「プロットカー」または「しなのカー」に色センサーを付加させる。
↓
MakeCodeエディタでプログラムをmicro:bitへダウンロード

↓
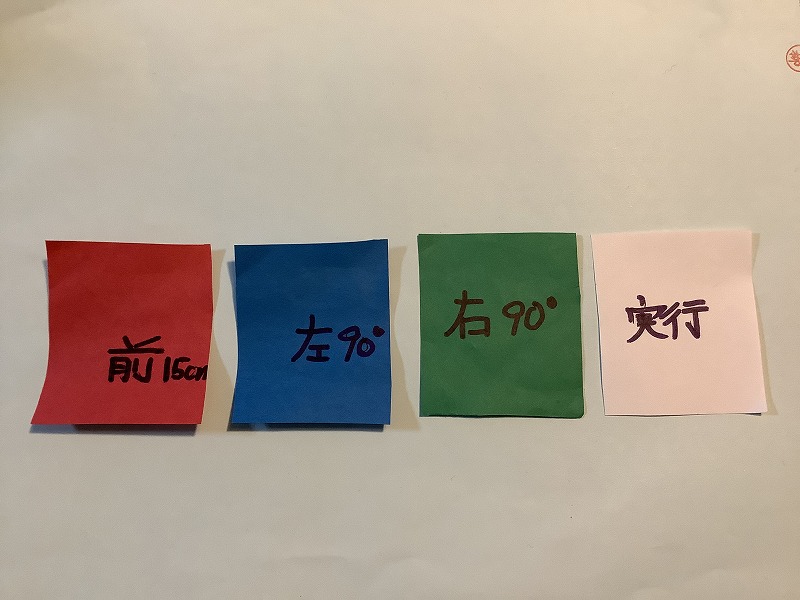
赤・緑・青・白カードを使って、車のコントロール
例えば、赤=前に15cm、緑=右へ90°回転、青=左へ90°回転、白=実行
↓
模造紙上で、街探検をする
細かな説明
TCS34725というカラーセンサーを使っています。R(赤)G(緑)B(青)W(白色)のデータを取得できます。赤紙では、RGBのパラメーターの中でRが一番大きな数になりますし、同様に緑紙はG値、青紙はB値が大きくなります。白紙は、赤・緑・青紙に比べて、Wの値が大きいので判断できます。このような仕組みを組み入れて、プログラムに生かします。
現在、「Plotcar」と「しなのカー」には、次のような拡張ブロックがあります。

このなかで、「color ID」というブロックは、検知した色を数字で返します。
赤・・・1、緑・・・2、青・・・3、白・・・4
そこで、カラーカードをセンサーに示して、次のように動くプログラムを作りました。
模造紙のマス目が1マス15cmにしているので、
赤カードを検知・・・前へ15cm進む
緑カードを検知・・・右へ90度回る
青カードを検知・・・左へ90度回る
白カードを検知・・・プログラムを実行する
ここでは、複数枚記憶をさせた上で走らせたいので、一端配列に記録させてから走らせるようにしています。
完成したプログラムは、以下のリンクに登録しています。
※Liバッテリーの省電力が働かないように、「P3をON」にしています。電池で動かしている場合は、ムダに電気を食いますので、削除してください。
他にも、ユーレカ工房のしなのカーにも、色センサーを取り付けして同じようなプログラミングか可能です。(精度は、Plotcarの方が高く、しなのカーはそれより劣ります)
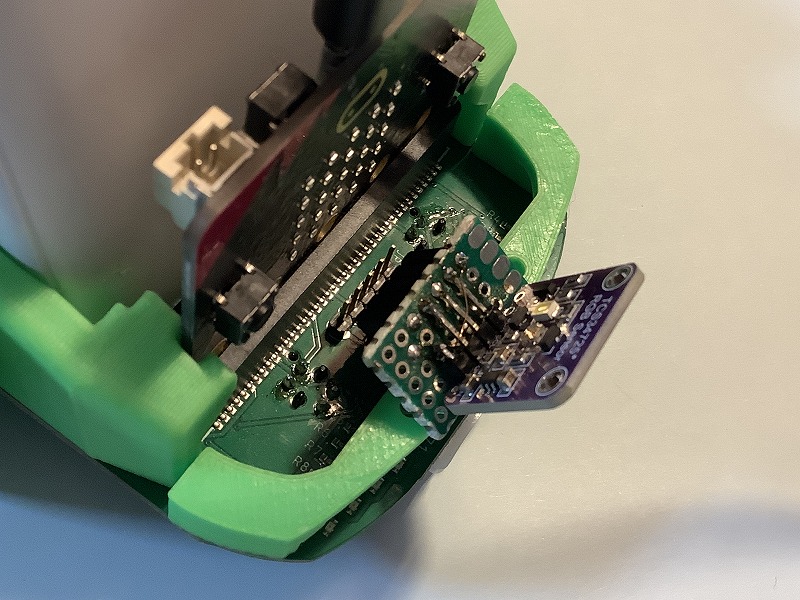
Plotcar用カラーセンサーの接続方法
① Plotcarの超音波距離センサーを外します。
② 超音波距離センサーのソケットの後ろにあるのが、I2C拡張の5ピンソケットです。
その部分に(ずれないように)、カラーセンサーの5ピンを差し込みます。
③ カバーをします。
④ プログラムをダウンロード後、カードをセンサーに差し込み、プログラムを組んでいく。
⑤ 完成したら、白カードを差し込み、実行する。
しなのカー用カラーセンサーの接続方法
しなのカーの右前に、I2C端子があります。その部分に、カバーごと差し込めます。
ユーレカ工房機材





コメント