
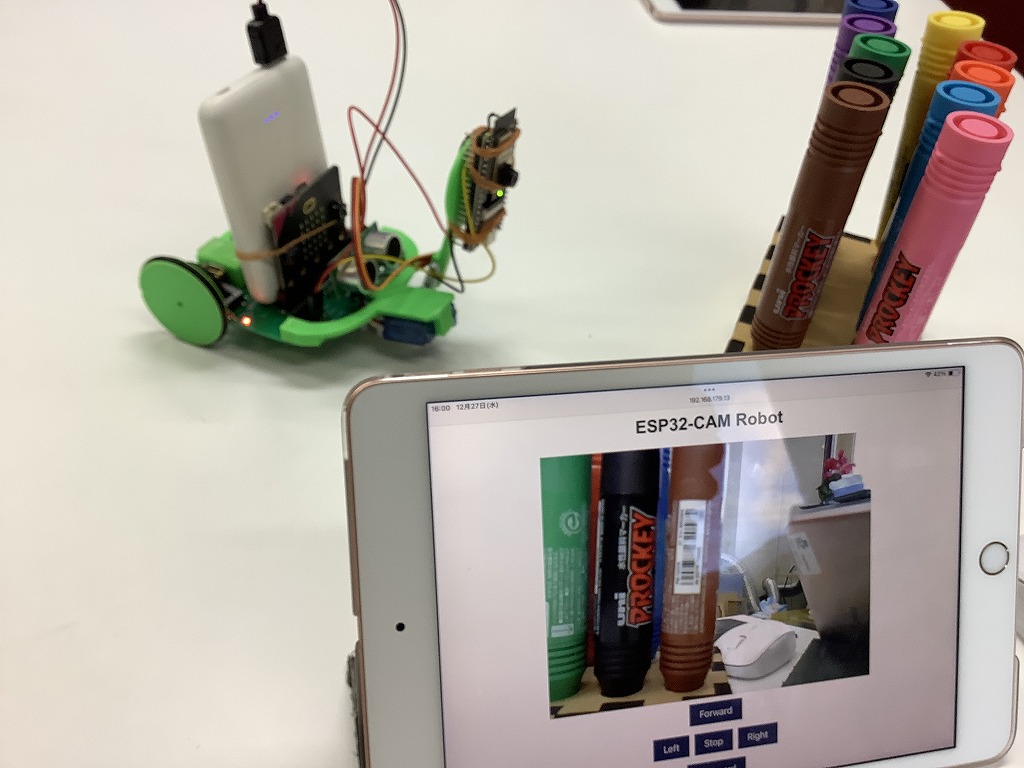
ブラウザー上で、カメラから送られてきた映像をみながら「しなのカー」をコントロールするシステムを作ります。
まずは、動作したビデオを見るとよく分かります。
システムの概要
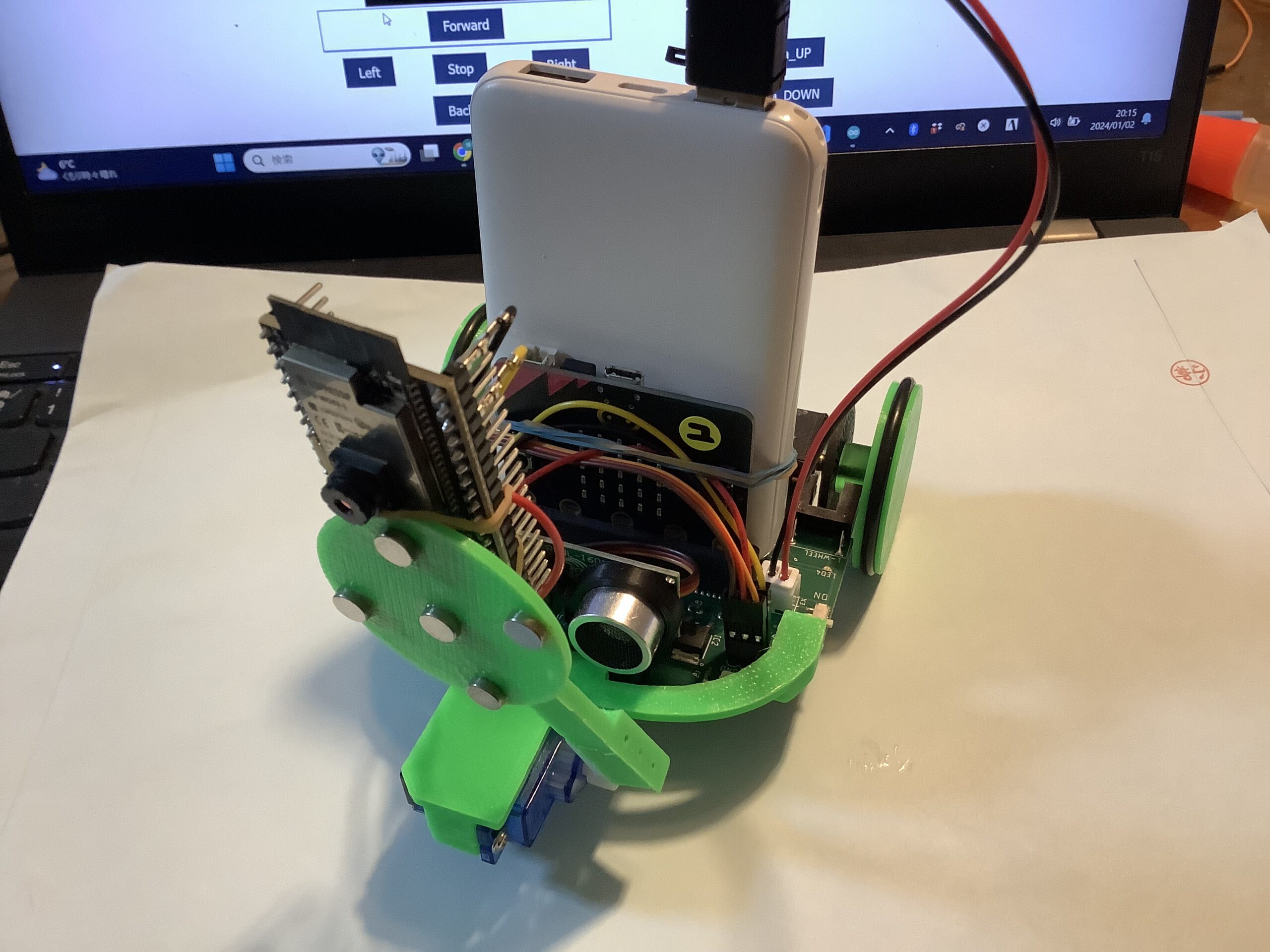
機材
しなのカー、モバイルバッテリー、ESP32-WROVER CAMボード


構成
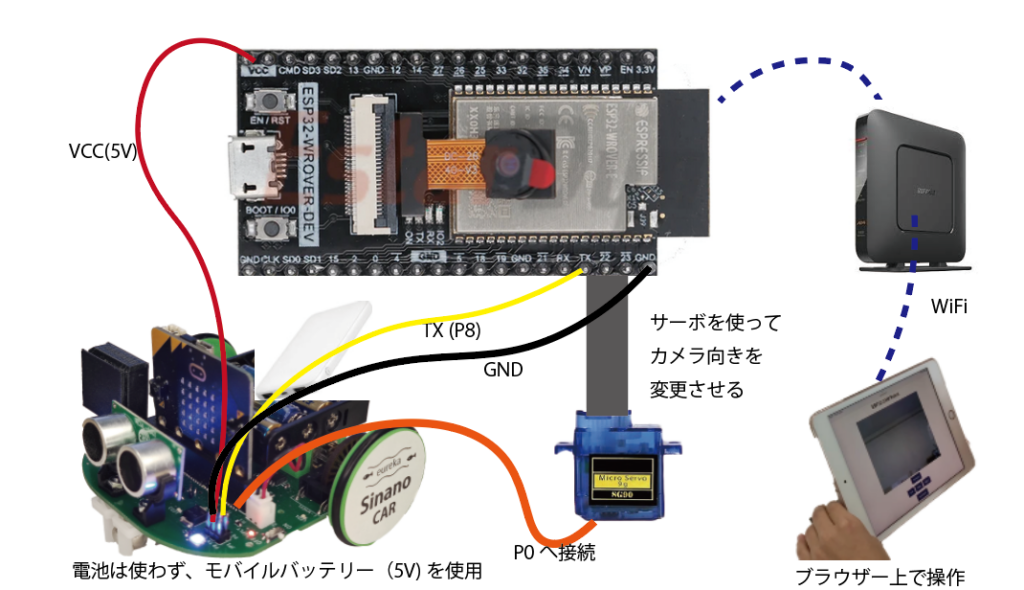
このシステムを使うためには、ESP32とmicro:bitの2つのプログラムが必要です。
特に、ESP32を扱うには、ArduinoIDEの操作が必要です。ネット上にいろいろ扱い方が出ています。

使用ボードは、「ESP32-WROVER」ですので、お間違いなく。
ESP32プログラム編
ブラウザーで車を操作する部分とカメラの映像を送る部分は、ESP32-WROVER CAMボードを利用します。ただし、しなのカー上のmicro:bitに、取得したデータ(前後左右と、サーボモーターの上下データ)を伝える部分は、有線接続したシリアル通信を利用しました。
まずは、使用したプログラムです。SSIDとPASSWORDには、自分の環境に合わせて変更します。
// プログラミングカーをカメラ(ブラウザ-)上でコントロール
// ユーレカ工房 2023/12/27
//ESP32のハードウェアシリアルの評価
//ESP32 UART0で文字列を送信(GPI01ピン使用)
//micro:bit P1で受信(P1使用)
// ESP32 micro:bit
// GND ----------- GND
// GPI01(TX) ------- P1(RX)
#include "Arduino.h"
#include <WiFi.h>
#include "esp_camera.h"
#include "esp_http_server.h"
#include "esp_timer.h"
#include "img_converters.h"
#include "fb_gfx.h"
const char* ssid = "********";
const char* password = "**********";
#define PWDN_GPIO_NUM -1
#define RESET_GPIO_NUM -1
#define XCLK_GPIO_NUM 21
#define SIOD_GPIO_NUM 26
#define SIOC_GPIO_NUM 27
#define Y9_GPIO_NUM 35
#define Y8_GPIO_NUM 34
#define Y7_GPIO_NUM 39
#define Y6_GPIO_NUM 36
#define Y5_GPIO_NUM 19
#define Y4_GPIO_NUM 18
#define Y3_GPIO_NUM 5
#define Y2_GPIO_NUM 4
#define VSYNC_GPIO_NUM 25
#define HREF_GPIO_NUM 23
#define PCLK_GPIO_NUM 22
#define PART_BOUNDARY "123456789000000000000987654321"
static const char* _STREAM_CONTENT_TYPE = "multipart/x-mixed-replace;boundary=" PART_BOUNDARY;
static const char* _STREAM_BOUNDARY = "\r\n--" PART_BOUNDARY "\r\n";
static const char* _STREAM_PART = "Content-Type: image/jpeg\r\nContent-Length: %u\r\n\r\n";
HardwareSerial mySerial(0);
httpd_handle_t camera_httpd = NULL;
httpd_handle_t stream_httpd = NULL;
static const char PROGMEM INDEX_HTML[] = R"rawliteral(
<html>
<head>
<meta charset="UTF-8">
<title>ESP32-CAM Robot</title>
<meta name="viewport" content="width=device-width, initial-scale=1">
<meta name="GENERATOR" content="JustSystems Homepage Builder Version 21.0.1.0 for Windows">
<style>
body { font-family: Arial; text-align: center; margin:0px auto; padding-top: 30px;}
table { margin-left: auto; margin-right: auto; }
td { padding: 8 px; }
.button {
background-color: #2f4468;
border: none;
color: white;
padding: 10px 20px;
text-align: center;
text-decoration: none;
display: inline-block;
font-size: 18px;
margin: 6px 3px;
cursor: pointer;
-webkit-touch-callout: none;
-webkit-user-select: none;
-khtml-user-select: none;
-moz-user-select: none;
-ms-user-select: none;
user-select: none;
-webkit-tap-highlight-color: rgba(0,0,0,0);
}
img { width: auto ;
max-width: 100% ;
height: auto ;
}
</style>
</head>
<body>
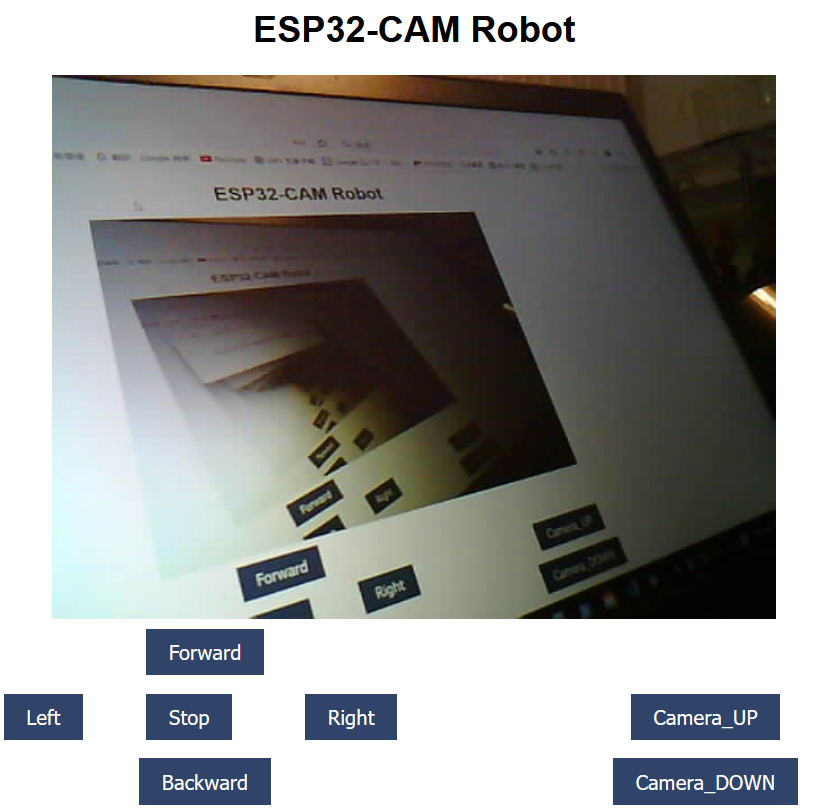
<h1>ESP32-CAM Robot</h1>
<img src="" id="photo" >
<table>
<tr>
<td colspan="3" style="text-align : center;">
<button class="button" onmousedown="toggleCheckbox('forward');" ontouchstart="toggleCheckbox('forward');" onmouseup="toggleCheckbox('stop');" ontouchend="toggleCheckbox('stop');">Forward
</button>
</td>
<td align="center" width="113"> </td>
</tr>
<tr>
<td align="center" width="117">
<button class="button" onmousedown="toggleCheckbox('left');" ontouchstart="toggleCheckbox('left');" onmouseup="toggleCheckbox('stop');" ontouchend="toggleCheckbox('stop');">Left
</button>
</td>
<td align="center" width="133">
<button class="button"
onmousedown="toggleCheckbox('stop');"
ontouchstart="toggleCheckbox('stop');">Stop
</button>
</td>
<td align="center" width="145">
<button class="button" onmousedown="toggleCheckbox('right');" ontouchstart="toggleCheckbox('right');" onmouseup="toggleCheckbox('stop');" ontouchend="toggleCheckbox('stop');">Right
</td>
<td align="center" width="113">
</td>
<td align="center" width="248">
<button class="button" onmousedown="toggleCheckbox('upper');" ontouchstart="toggleCheckbox('upper');" onmouseup="toggleCheckbox('stop');" ontouchend="toggleCheckbox('stop');">Camera_UP
</button>
</td>
</tr>
<tr>
<td colspan="3" align="center">
<button class="button" onmousedown="toggleCheckbox('backward');" ontouchstart="toggleCheckbox('backward');" onmouseup="toggleCheckbox('stop');" ontouchend="toggleCheckbox('stop');">Backward </button>
</td>
<td align="center" width="113">
</td>
<td align="center" width="248">
<button class="button" onmousedown="toggleCheckbox('down');" ontouchstart="toggleCheckbox('down');" onmouseup="toggleCheckbox('stop');" ontouchend="toggleCheckbox('stop');">Camera_DOWN
</button>
</td>
</tr>
</table>
<script>
function toggleCheckbox(x) {
var xhr = new XMLHttpRequest();
xhr.open("GET", "/action?go=" + x, true);
xhr.send();
}
window.onload = document.getElementById("photo").src
= window.location.href.slice(0, -1) + ":81/stream";
</script>
</body>
</html>
)rawliteral";
static esp_err_t index_handler(httpd_req_t *req){
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, (const char *)INDEX_HTML, strlen(INDEX_HTML));
}
static esp_err_t stream_handler(httpd_req_t *req){
camera_fb_t * fb = NULL;
esp_err_t res = ESP_OK;
size_t _jpg_buf_len = 0;
uint8_t * _jpg_buf = NULL;
char * part_buf[64];
res = httpd_resp_set_type(req, _STREAM_CONTENT_TYPE);
if(res != ESP_OK){
return res;
}
while(true){
// Take Picture with Camera
// fb = NULL;
fb = esp_camera_fb_get();
if (!fb) {
mySerial.println("Camera capture failed");
res = ESP_FAIL;
} else {
if(fb->width > 400){
if(fb->format != PIXFORMAT_JPEG){
bool jpeg_converted = frame2jpg(fb, 80, &_jpg_buf, &_jpg_buf_len);
esp_camera_fb_return(fb);
fb = NULL;
if(!jpeg_converted){
mySerial.println("JPEG compression failed");
res = ESP_FAIL;
}
} else {
_jpg_buf_len = fb->len;
_jpg_buf = fb->buf;
}
}
}
if(res == ESP_OK){
size_t hlen = snprintf((char *)part_buf, 64, _STREAM_PART, _jpg_buf_len);
res = httpd_resp_send_chunk(req, (const char *)part_buf, hlen);
}
if(res == ESP_OK){
res = httpd_resp_send_chunk(req, (const char *)_jpg_buf, _jpg_buf_len);
}
if(res == ESP_OK){
res = httpd_resp_send_chunk(req, _STREAM_BOUNDARY, strlen(_STREAM_BOUNDARY));
}
if(fb){
esp_camera_fb_return(fb);
fb = NULL;
_jpg_buf = NULL;
} else if(_jpg_buf){
free(_jpg_buf);
_jpg_buf = NULL;
}
if(res != ESP_OK){
break;
}
//Serial.printf("MJPG: %uB\n",(uint32_t)(_jpg_buf_len));
}
return res;
}
static esp_err_t cmd_handler(httpd_req_t *req){
char* buf;
size_t buf_len;
char variable[32] = {0,};
buf_len = httpd_req_get_url_query_len(req) + 1;
if (buf_len > 1) {
buf = (char*)malloc(buf_len);
if(!buf){
httpd_resp_send_500(req);
return ESP_FAIL;
}
if (httpd_req_get_url_query_str(req, buf, buf_len) == ESP_OK) {
if (httpd_query_key_value(buf, "go", variable, sizeof(variable)) == ESP_OK) {
} else {
free(buf);
httpd_resp_send_404(req);
return ESP_FAIL;
}
} else {
free(buf);
httpd_resp_send_404(req);
return ESP_FAIL;
}
free(buf);
} else {
httpd_resp_send_404(req);
return ESP_FAIL;
}
sensor_t * s = esp_camera_sensor_get();
int res = 0;
if(!strcmp(variable, "forward")) {
mySerial.println("F");
}
else if(!strcmp(variable, "left")) {
mySerial.println("L");
}
else if(!strcmp(variable, "right")) {
mySerial.println("R");
}
else if(!strcmp(variable, "backward")) {
mySerial.println("B");
}
else if(!strcmp(variable, "stop")) {
mySerial.println("S");
}
else if(!strcmp(variable, "upper")) {
mySerial.println("U");
}
else if(!strcmp(variable, "down")) {
mySerial.println("D");
}
else {
res = -1;
}
if(res){
return httpd_resp_send_500(req);
}
httpd_resp_set_hdr(req, "Access-Control-Allow-Origin", "*");
return httpd_resp_send(req, NULL, 0);
}
void startCameraServer(){
httpd_config_t config = HTTPD_DEFAULT_CONFIG();
config.server_port = 80;
httpd_uri_t index_uri = {
.uri = "/",
.method = HTTP_GET,
.handler = index_handler,
.user_ctx = NULL
};
httpd_uri_t cmd_uri = {
.uri = "/action",
.method = HTTP_GET,
.handler = cmd_handler,
.user_ctx = NULL
};
httpd_uri_t stream_uri = {
.uri = "/stream",
.method = HTTP_GET,
.handler = stream_handler,
.user_ctx = NULL
};
if (httpd_start(&camera_httpd, &config) == ESP_OK) {
httpd_register_uri_handler(camera_httpd, &index_uri);
httpd_register_uri_handler(camera_httpd, &cmd_uri);
}
config.server_port += 1;
config.ctrl_port += 1;
if (httpd_start(&stream_httpd, &config) == ESP_OK) {
httpd_register_uri_handler(stream_httpd, &stream_uri);
}
}
void setup() {
// 2.4V以下になるとリセットがかかるのを止める
// WRITE_PERI_REG(RTC_CNTL_BROWN_OUT_REG, 0); //disable brownout detector
mySerial.begin(115200);
camera_config_t config;
// XCLK 20MHz or 10MHz
config.xclk_freq_hz = 20000000;
config.ledc_channel = LEDC_CHANNEL_0;
config.ledc_timer = LEDC_TIMER_0;
config.pin_xclk = XCLK_GPIO_NUM;
config.pin_d0 = Y2_GPIO_NUM;
config.pin_d1 = Y3_GPIO_NUM;
config.pin_d2 = Y4_GPIO_NUM;
config.pin_d3 = Y5_GPIO_NUM;
config.pin_d4 = Y6_GPIO_NUM;
config.pin_d5 = Y7_GPIO_NUM;
config.pin_d6 = Y8_GPIO_NUM;
config.pin_d7 = Y9_GPIO_NUM;
config.pin_vsync = VSYNC_GPIO_NUM;
config.pin_href = HREF_GPIO_NUM;
config.pin_pclk = PCLK_GPIO_NUM;
config.pin_sscb_sda = SIOD_GPIO_NUM;
config.pin_sscb_scl = SIOC_GPIO_NUM;
config.pin_pwdn = PWDN_GPIO_NUM;
config.pin_reset = RESET_GPIO_NUM;
config.pixel_format = PIXFORMAT_JPEG;
// FRAMESIZE_ + QVGA|CIF|VGA|SVGA|XGA|SXGA|UXGA
if(psramFound()){
mySerial.println("psram Found.");
config.frame_size = FRAMESIZE_VGA;
config.jpeg_quality = 10;
config.fb_count = 2;
} else {
mySerial.println("psram not Found.");
config.frame_size = FRAMESIZE_SVGA;
config.jpeg_quality = 12;
config.fb_count = 1;
}
// Init Camera
esp_camera_init(&config);
/*
esp_err_t err = esp_camera_init(&config);
if (err != ESP_OK) {
Serial.printf("Camera init failed with error 0x%x", err);
return;
}*/
// Wi-Fi connection
WiFi.begin(ssid, password);
while (WiFi.status() != WL_CONNECTED) {
delay(500);
mySerial.print(".");
}
mySerial.println("");
mySerial.println("WiFi connected");
mySerial.print("Camera Stream Ready! Go to: http://");
mySerial.println(WiFi.localIP());
// Start streaming web server
startCameraServer();
}
void loop() {
}参考にしたサイトは、次の通りです。他にも、ネット上にはESP32CAMを使った情報がいろいろあります。それに、サーボの制御ボタンを追加しています。
ESP32の利用方法は、ネット上を参考にしてください。
操作するIPアドレスは、ArduinoIDEのシリアルモニターに表示されます。(この部分が、とてもハードルが高いので、そのうちmicro:bitからWiFiのID,PASSWORDとIPアドレスを表示させられるように改造したものを開発したいです。
接続は、ESP32→micro:bitの一方向だけですので、ESP32の5V,TX,GNDを上図のようにしなのカーに結線します。
micro:bit側のプログラム
ここでは、ESP32からシリアル通信を通して送られたデータを元に、しなのカーを操作するようにプログラムします。ESP32から、前進=F 後進=B 右=R 左=L サーボのアップ=U ダウン=Dの文字列が送られてきますので、それに合わせて しなのカーを動かしています。
ただし、送られてくる文字列の最後尾に「改行など CRとLF」が余計に付いているので、先頭の1文字を取り出すようにしています。
しなのカーの構成
不格好なのですが、以前かるた取りのために作ったアームがありましたので、そこに輪ゴムで取り付けました。
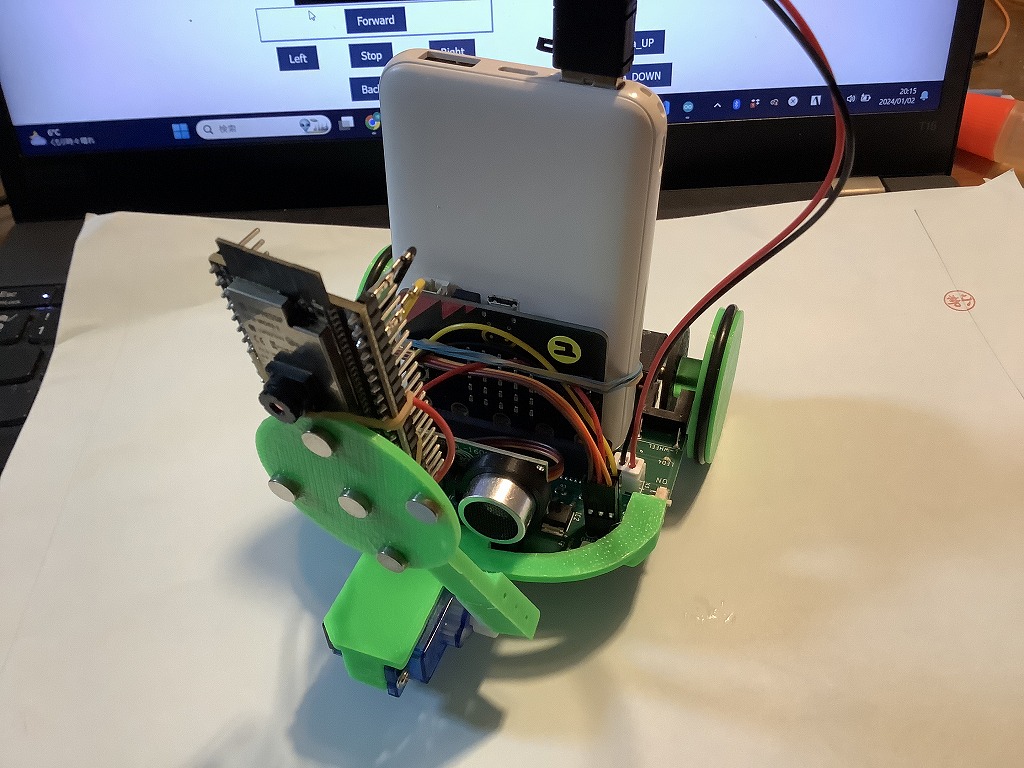
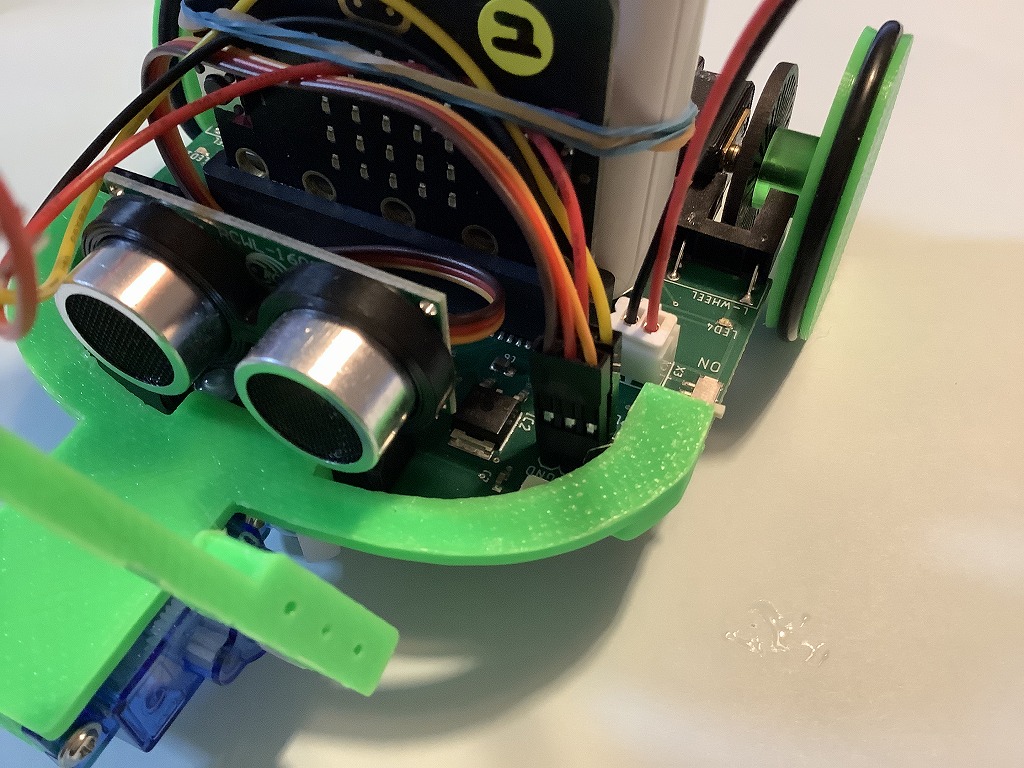
しなのカーの拡張端子を使用。P0にサーボ、P8へはESP32からのTXをつなげます
カメラ付きの探査機を作ってみたい方は、HPよりお問い合わせください。機材などを斡旋いたします。


コメント