
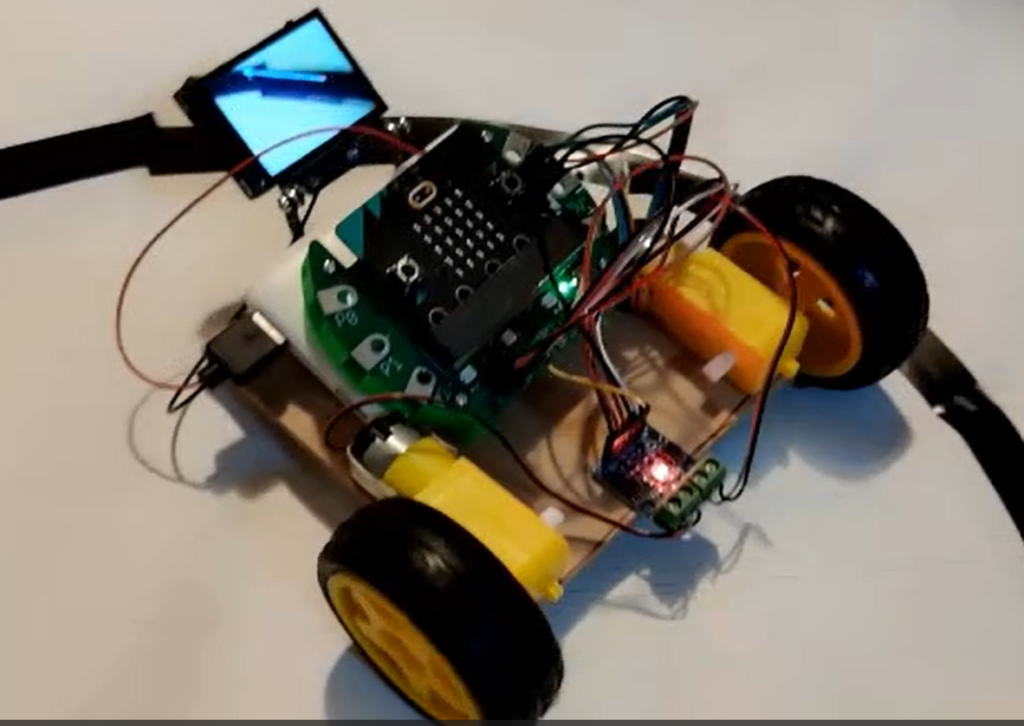
前回作った「手作りプログラミングカー」にAIカメラを搭載して、AI自動運転車にしてみました。
AIカメラは、HUSKYLENS(AI Vision Sensor)という商品で、$50ぐらいから販売されています。

このカメラは、顔認証や色の識別などいろいろなことができるすごいカメラですが、この中に「Line Tracking」というモードがあったので、黒線の上を走らせてみました。
ただ、1000円で作った(⇐強調)プログラミングカーの意味は薄れます・・・。
まずは、「手作りプログラミングカー」にHUSKYLENSを取り付けます。何せMDF板を切っただけの「手作り車台」ですので、どんな加工でもOKです。穴を空けて、ネジ止めしました。HUSKYLENSとiːoは、I2Cを使って通信させます。
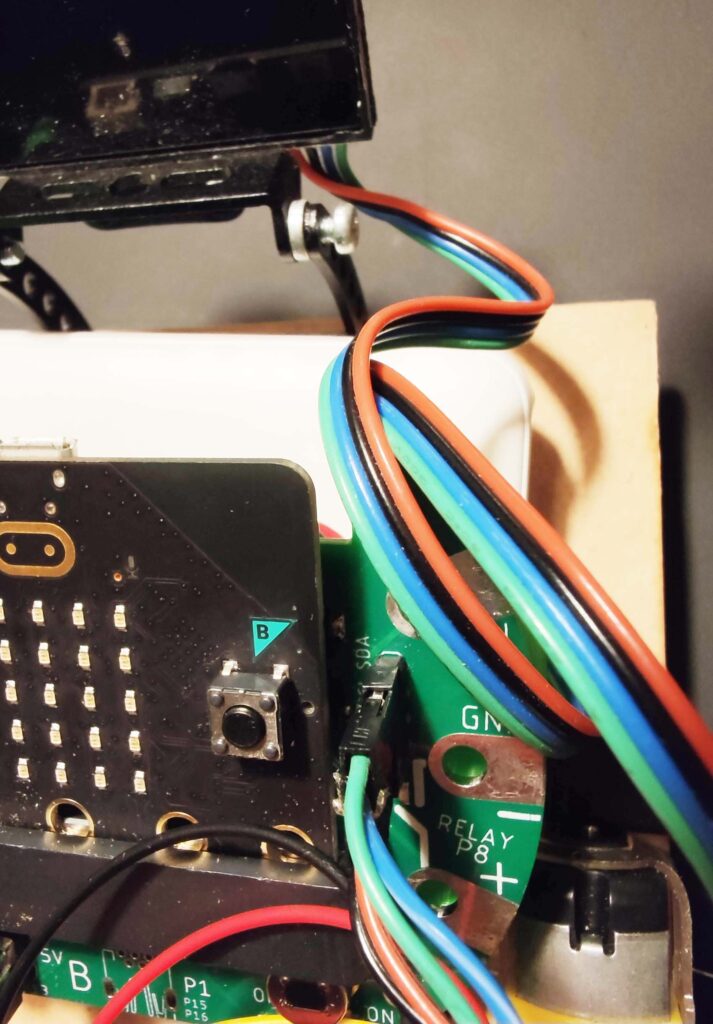
電源は、iːoの電池でも動くのですが、結構このカメラは電気を食います。今回は、モバイルバッテリーから5Vを供給して使用しています。(iːoは、内部で3.3Vを作ってmicro:bitに供給しています。)
写真のように、HUSKYLENSはラインを認識して、その始点・終点のX、Y座標を測定します。その値を、micro:bitに取り込めば、車体を正しい方向に導かせることができます。
うまくプログラムを組めば、コースの曲がり具合をもとに車体を曲げる角度まで調整できそうです。1周の速さ競争をするとなると、なかなか奥が深そうです。
私が作ったプログラムですが、はっきり言ってかなり適当です。単純に、黒線が中心からずれたら修正するだけのプログラムなので、ビデオを見てもらうと分かるのですが、ぎくしゃくしながら方向を修正しています。さらに、カメラが前にあるので、黒線上を通っていません。まあ、実験ということで許してください。もっと大きなコースでやりたいですよね!

いかがだったでしょうか。次は、HUSKYLENSとサーボモーターを使った工作を考えています。ご期待ください。感想もお寄せください。

