
昆虫や人は、どうやって関節を動かして歩いているんだろうと思ったことはありませんか?あまりにも身近過ぎるし、確かめようも無い問題ですよね。
でも、ロボットを作って動かしてみると、これがすごくよく分かるんです。分かると言っても、ほんの一部だと思うのですが、とても参考になります。
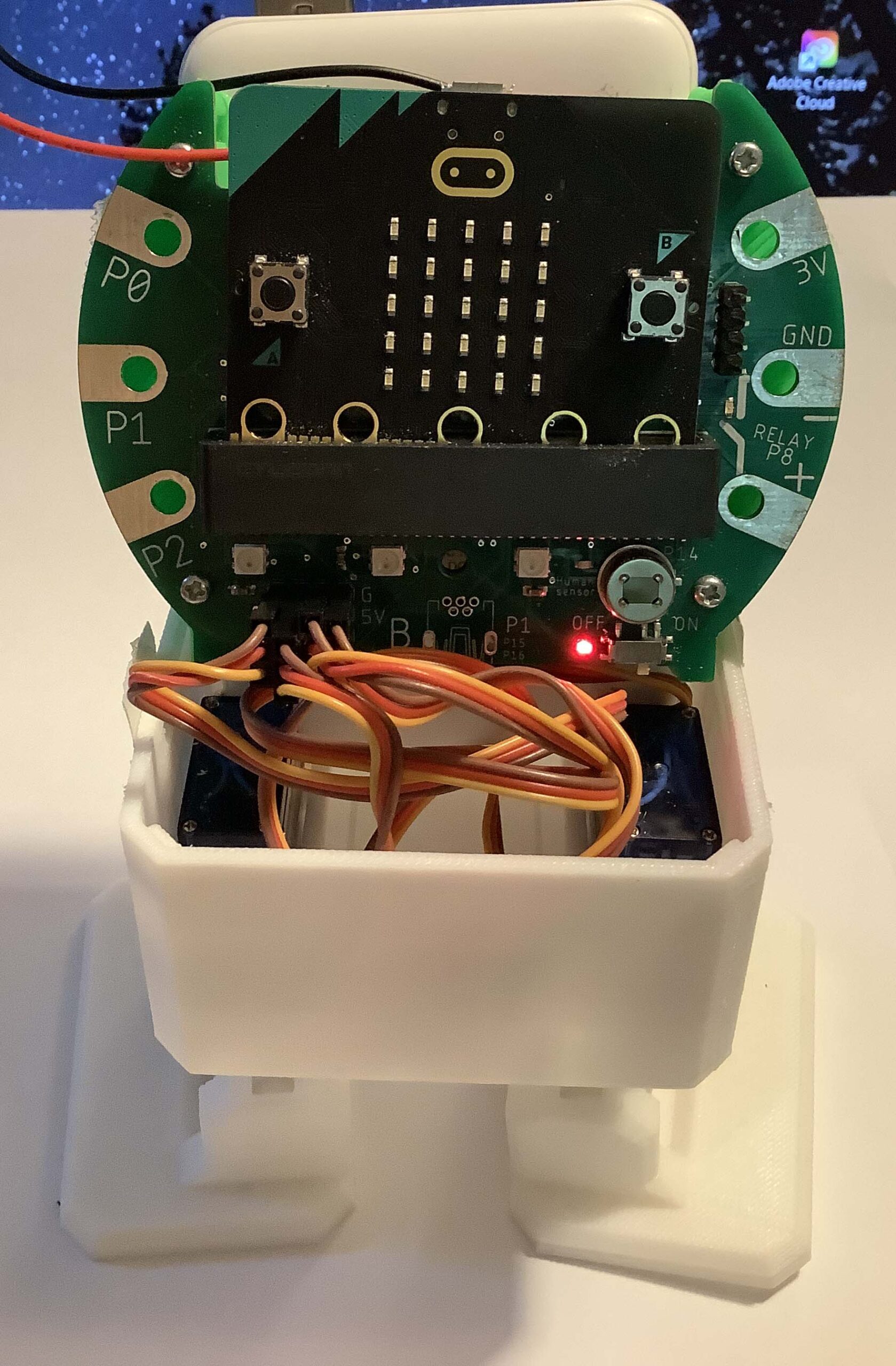
そこで、今回はiːoを使って二足歩行ロボットを作ってみました。
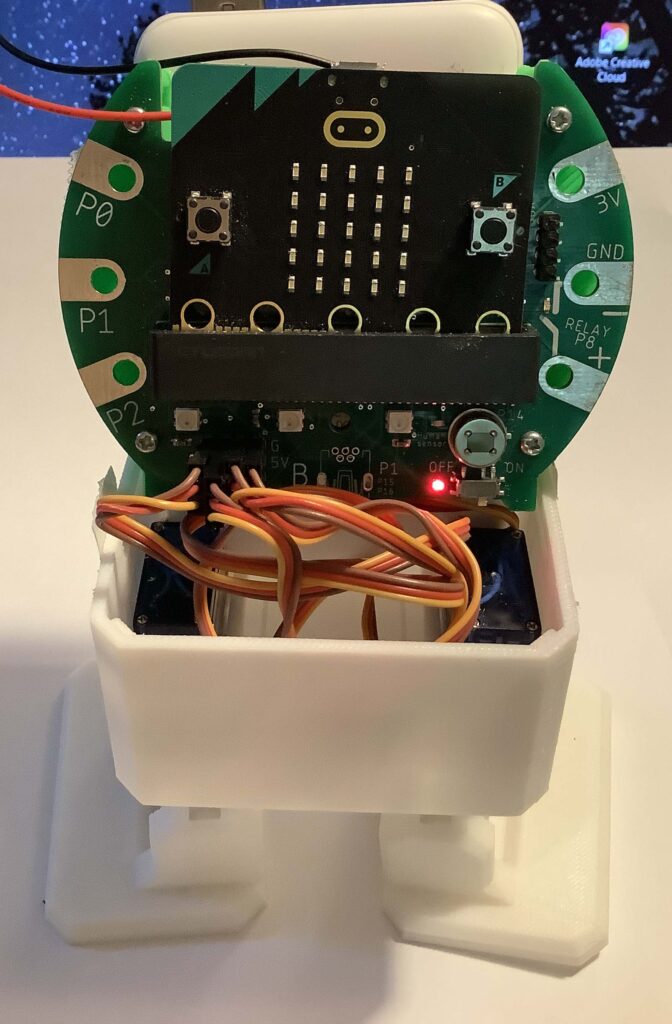
人の場合は腰、膝、足、足の指などあらゆるところに関節を使って歩くわけですが、今回のロボットは関節4カ所(左右の腰、左右の足)で、そこにサーボモーターをつけたロボットになります。
これは、Otto DIYというロボットの部品を流用しています。otto DIYは、Arduinoというマイクロコンピュータを使っています(otto DIYには、micro:bitを使った物もあります)が、今回はiːoに載せたmicro:bitで動かします。
さて、二足歩行ロボットを動かすためには、腰の関節と足の関節をうまく使う必要があります。ビデオを見てもらうと分かるのですが、次のような順になります。
① 体を傾け、片方の足に重心を移す。
② 足の関節を動かして、足を前に進める。
③ 今度は反対側に傾ける。
④ ②と同じように、足の関節を動かして、足を前に進める。
この動作を繰り返していきます。
この際に、iːo本体の重心をどこに置くかとか、サーボの動く速度をどれぐらいにするか、傾け方をどれぐらいがいいのかなど、いろいろなパラメーターがあります。きっと、しっかりした理論があるんだと思いますが、何せ我流なので、試行錯誤でとりあえず歩くようにしました。
こうやってロボットを作ると、人の腰の働きや足の働きなど、大切なんだなあと気づきます。
真面目に取り組むと、かなり面白いロボットになると思うのですが、どなたか挑戦する方いませんか?機材、製作します。

