
micro:bitのエッジ部分(金色に輝くところ)の働きを知っていますか?ここは、「入出力端子」と呼ばれていて、下図のように番号が割り振られて、できることが決められています。
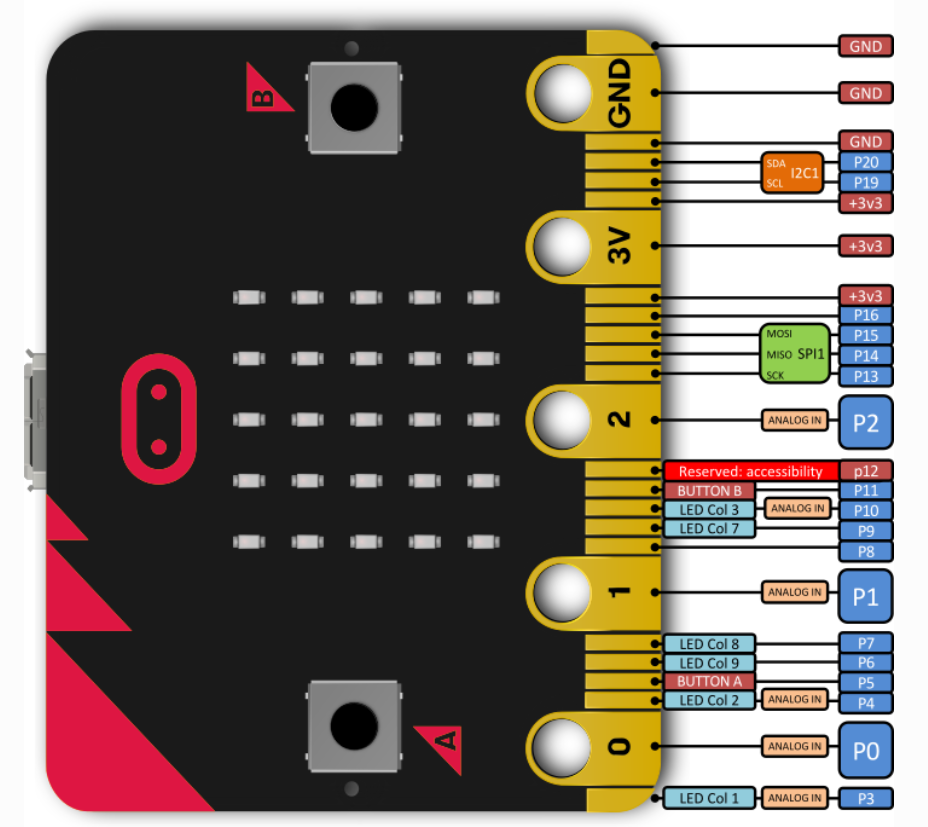
この中で、すでにmicro:bitで使用している端子があるため、本当に自由に使える端子は、P0,P1,P2,(P9),P13,P14,P15,P16だけです。micro:bitには様々なセンサーやLEDなどが配置されているのですが、さらにこの拡張端子を使用することで応用が広がります。
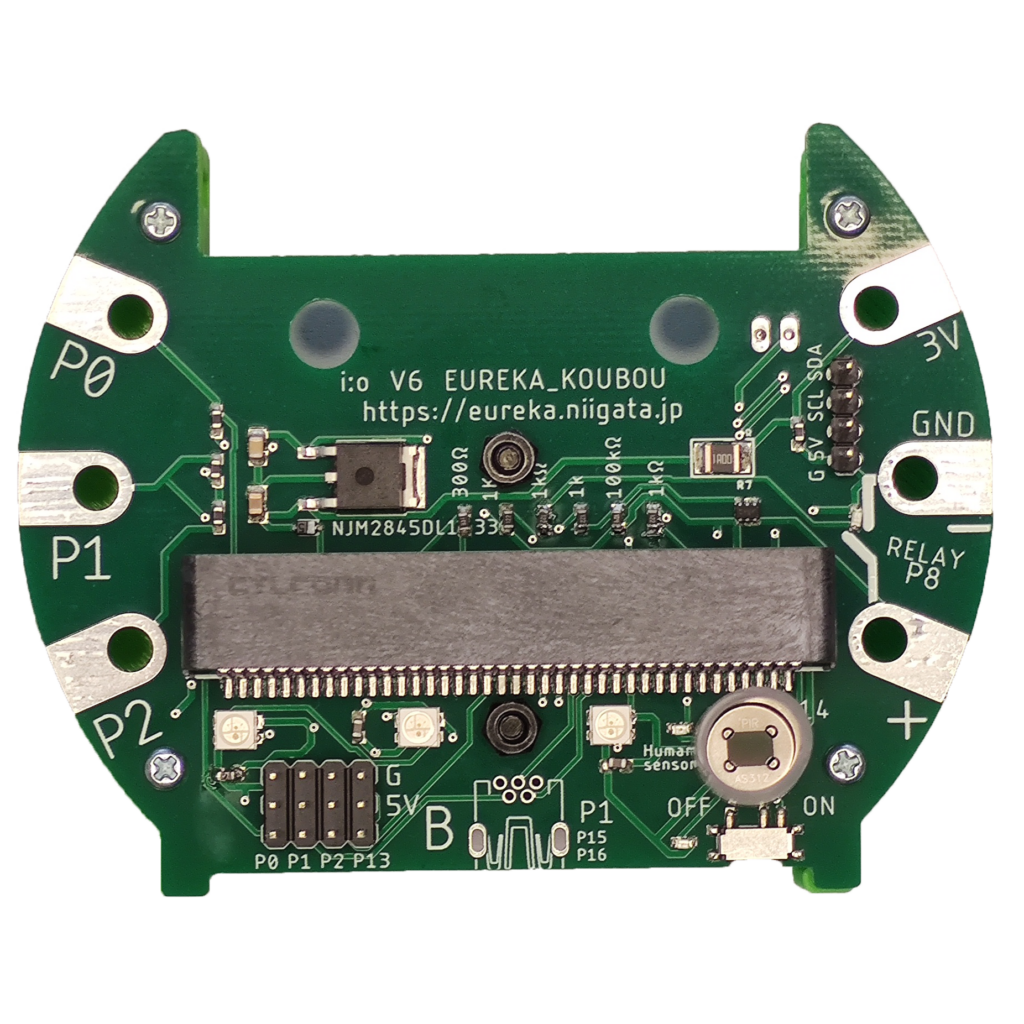
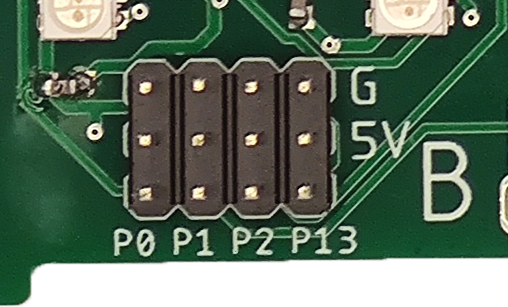
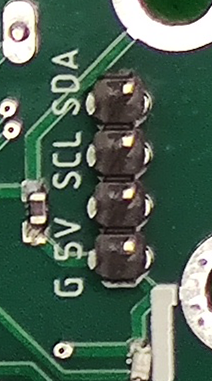
このままの端子では使用しづらいので、iːoでは、ネコのような模様にも見えるパッドが6個(P0,P1,P2,5V,GND,Relay)と、ピンヘッダーとして(P0,P1,P2,P13,I2C)が配置されています。
とっても難しそうに感じるかもしれませんが、やり方さえ知ってしまえば、特にmicro:bitでは簡単に使えます。
一番のおすすめは、なんたってサーボモーターです。モーターがすごいのです。
普通のDCモーターは、電流を流すと回転し、+ーを入れ替えると(電流の向きを逆にすると)逆回転します。さらに、電流の大きさで回転速度が変わります。
一方、サーボモーターは、コンピュータからの命令に従って決められた角度に動き静止します。たとえば、ロボットの腕を考えてください。関節にサーボモーターが生かされていて、決められた角度で動くことを利用し、ものを持ち上げたり、腕を振ったりできるのです。
まず、iːoで使用するには、電池を入れてスイッチをONにします。

サーボモーターは、拡張ピンに次のように接続します。
- GND --- サーボの茶色線
- 5V ーーー 赤線
- P0 --- オレンジ線

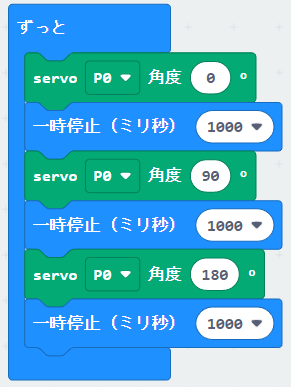
次の動画は、0°→1秒停止→90°→1秒停止→180°→1秒停止と繰り返して動きます。
サーボモーターを使った場面を想像できるでしょうか?iːoを使った作品を何点か紹介していきたいと思います。
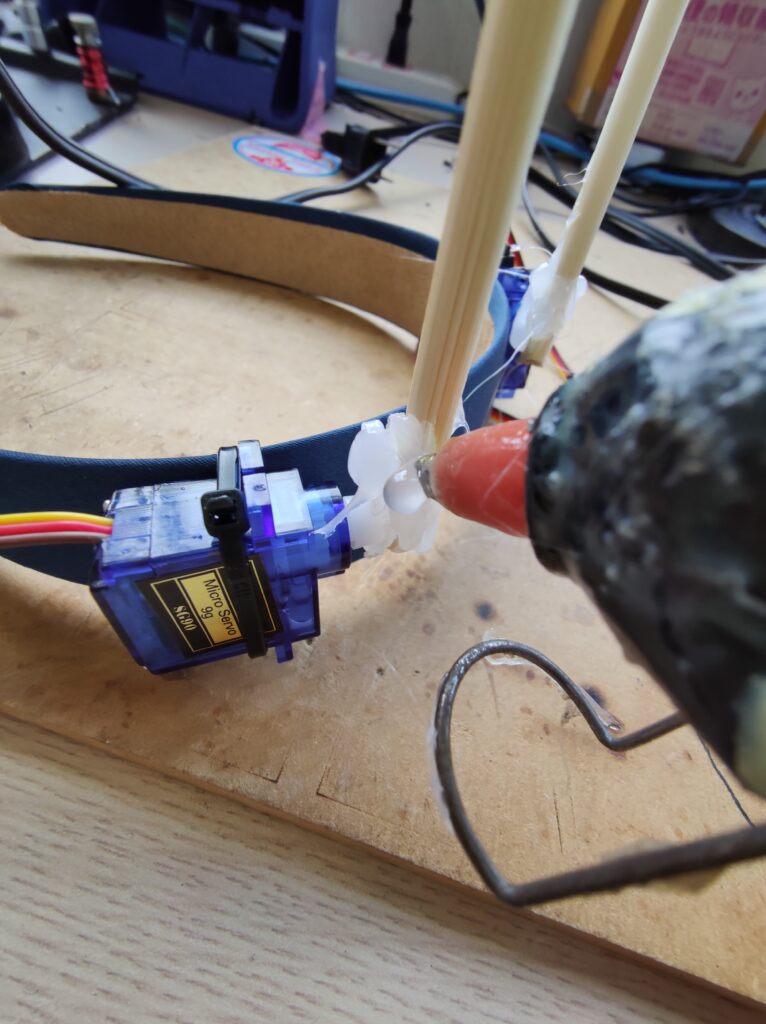
例1 2023年新年に向けてのウサギ耳飾り!
switch educationさんの「ネコ耳ワークショップ」の二番煎じで~す。来年はうさぎ年ということで、耳を作ってみました。製作はとっても簡単で、100円ショップで購入したカチューシャにサーボモーターを結束バンドで取り付けます。その後、グルーガンでサーボのモーターピンに割り箸を貼り付けます。その後、ウサギ耳を割り箸に貼り付けます。
プログラムは簡単です。Bボタンを押すと耳が立つ(90°)、Aボタンで耳が倒れる(0°、180° サーボの配置が向かい合わせなのでこのようになります)というプログラムです。不気味な人形に耳が立つという、ほとんど心霊現象・・・で、ごめんなさい!かわいい子限定ですね(笑)
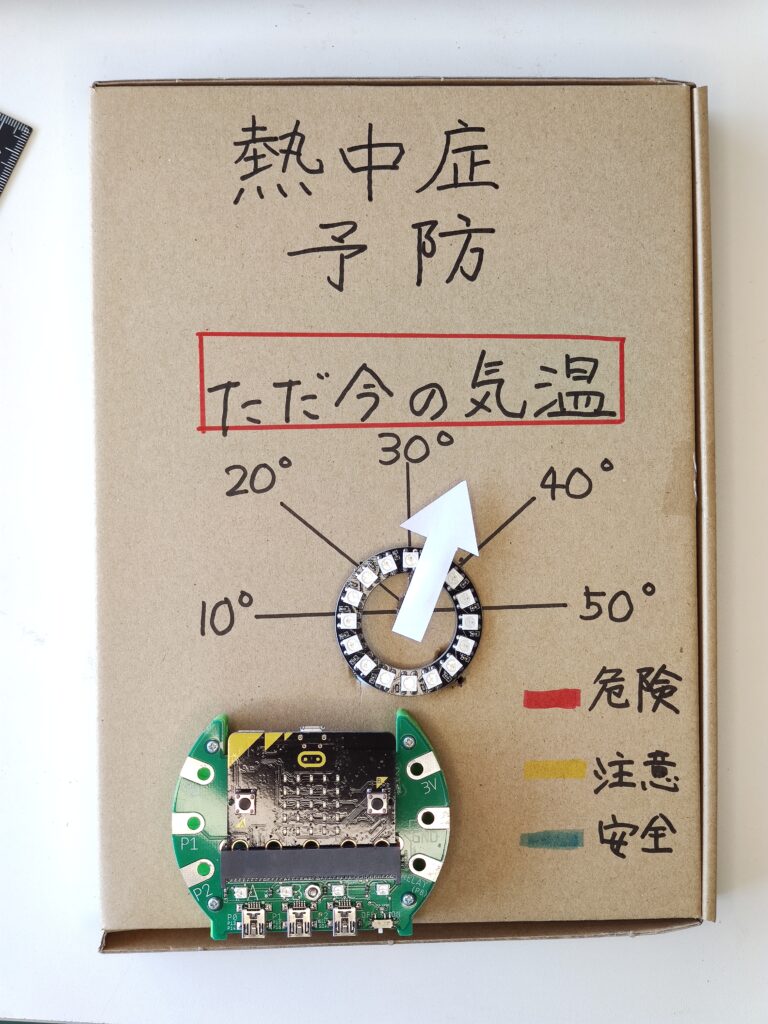
例2 熱中症予防装置
温度を角度に換算して、アナログ風に針を動かします。夏は、活躍しそうです。
例3 プロットカーのペン上下装置
実用性という面で1つ紹介します。ユーレカ工房で出しているプロットカーのペン上げ下げに使っています。

例4 カップラーメンタイマー
旧製品のビデオですが、サーボモーターを使ったタイマーです。3分=180秒なので、そのまま角度に直せます。
ここまで来ると、サーボモーターを利用した場面を想像できるようになったのではないでしょうか。
算数の角度の学習をより習熟するために、理科の共振で、楽しいロボット作りなど・・・、アイディア次第で様々なものを作れる、STEAM教育にぴったりの部品です。
今回使用した小型のサーボモーターは、1個200円程度から購入可能です。micro:bitを拡張させるボードは様々ありますので、どれでもできます。iːoを使うと、電池も一緒なので、作りやすいです。
ぜひ、STEAM教育に取り組みましょう!


