ページ後半にサンプルプログラムあり
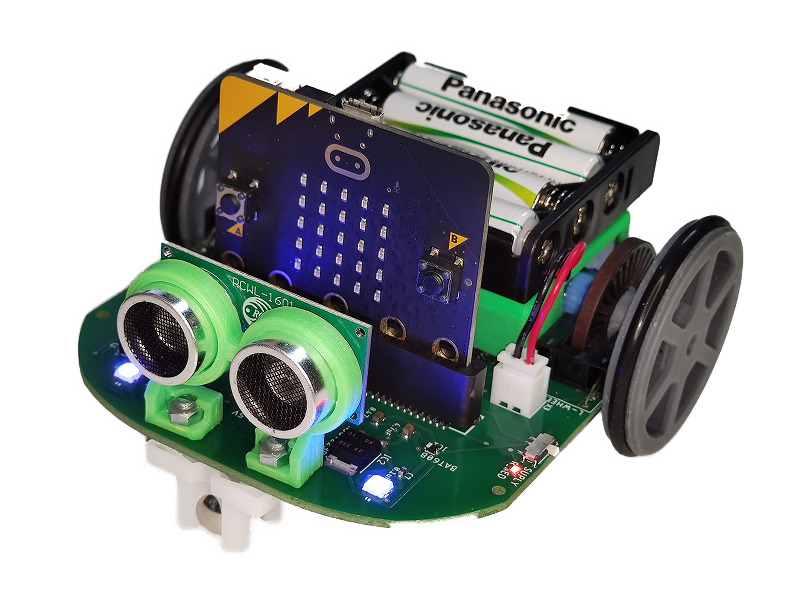 独立タイプの「サープ・カー」 独立タイプの「サープ・カー」 |
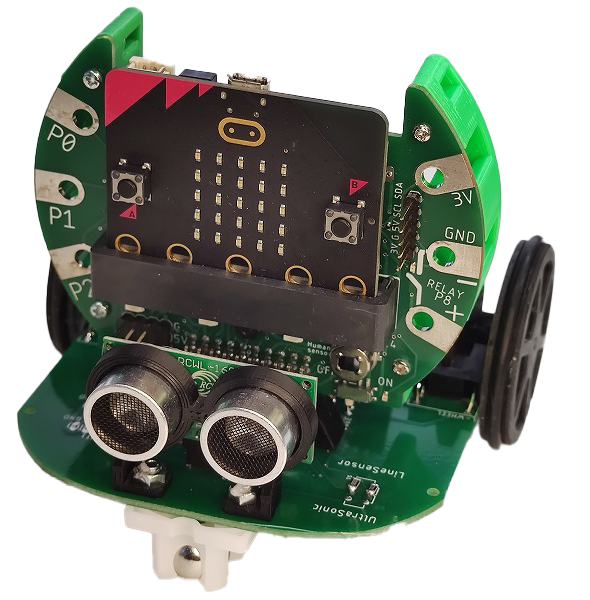 イーオと組み合わせて使う イーオと組み合わせて使う「サープカー・ユニット」 |
|---|

2024/07/11 カラーセンサーに黒を追加
2024/07/08 ラインセンサのブロックの追加と選択方法変更・サーボモーターブロック追加・カラーセンサーブロック追加2024/05/25 超音波距離センサーの反応性 改善
2024/03/07 フォトリフレクタの状態をiːo用のNeoPixelへ反映(黒=青色 白=白色)
2024/03/05 前後・左右のブロックで連続で実施したときのバグ修正
2024/02/22 ラインセンサーのしきい値を変更
サンプルプログラム
2台のmicro:bitを使って、傾きで前後左右に動きます。
「10cm前のカードを取って、もどってくる」
180°=下げる 70°=上げる
※前後に、待ち時間を入れること
※P3端子を使用
ペアレントした後に、ゲームパットの右下で「開始」をすると、コントロールできます。
Neopixel(フルカラーLED)と兼用できないので、NeoPixelは使用できないようになっている特別バージョンです。
A(前進) B(後進) C(左折) D(右折) 3(左回転) 4(右回転) 1、2(停止)
Aボタン 4回繰り返し(前15cm左90度前15cm右90度)
Bボタン 白黒のライントレース+障がい物で停止
ロゴタップ カラーライントレース(緑の上をにる)